costar_plan
Integrating learning and task planning for robots with Keras, including simulation, real robot, and multiple dataset support.
CTP on the Real TOM robot
Starting
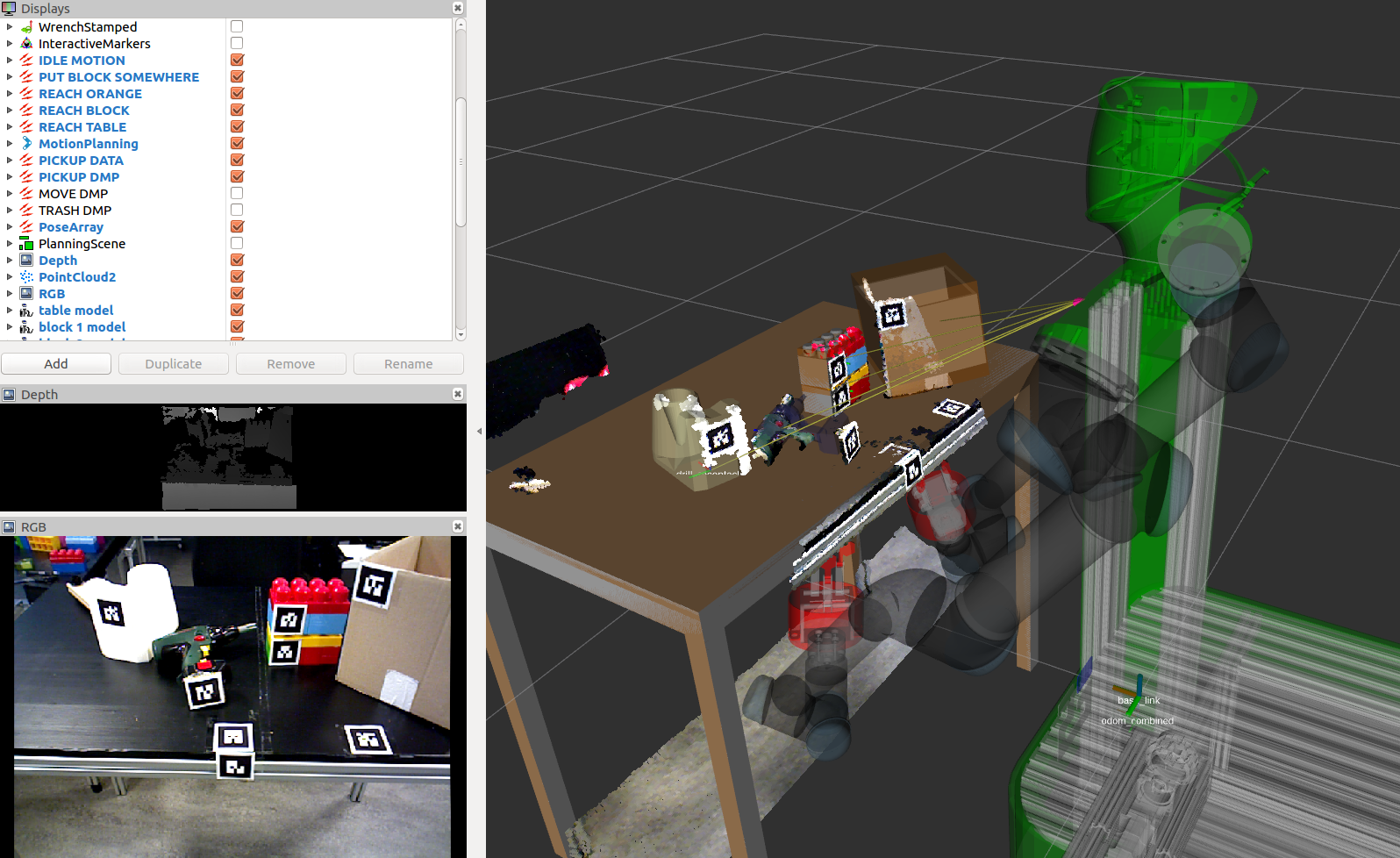
roslaunch ctp_tom planner.launch
After startup, you should see something like this:
Fake (Debugging) Setup
roslaunch ctp_tom planner.launch
rosrun ctp_tom fake_objects.py # add some extra oranges to the scene
rosrun ctp_tom parse.py a.bag,b.bag,c.bag --fake --show
You can run the parse.py script with many different arguments and rosbags. Some examples:
parse.py $BAGS --fake # provide fake object detections and compile task
parse.py $BAGS --fake --show # show a graph
parse.py $BAGS --fake --plan # compute a plan
parse.py $BAGS --fake --plan --max_depth $X --iter $Y # change planning params
Using these without the --fake flag is currently a WIP.
Current Commands To Run
roslaunch ctp_tom planner.launch fake:=True
rosrun ctp_tom parse.py --fake --show --debug cubes_test/Gripper/planning_gripper_cubes_2018-02-23-15-18-41.bag
You should see a graph of the actions being performed, and which objects they were relative to.
The TOM-Test script contains actual execution code, once we have a working graph:
rosrun ctp_tom tom_test.py
However this is not currently configured (as of 2018-03-30) to run graphs parsed from rosbag files.
Execution Setup (Work in progress)
export BAGS=a.bag,b.bag,c.bag,d.bag,e.bag
roslaunch ctp_tom planner.launch slave:=true
rosrun ctp_tom parse.py $BAGS --plan --execute
ROS Topics
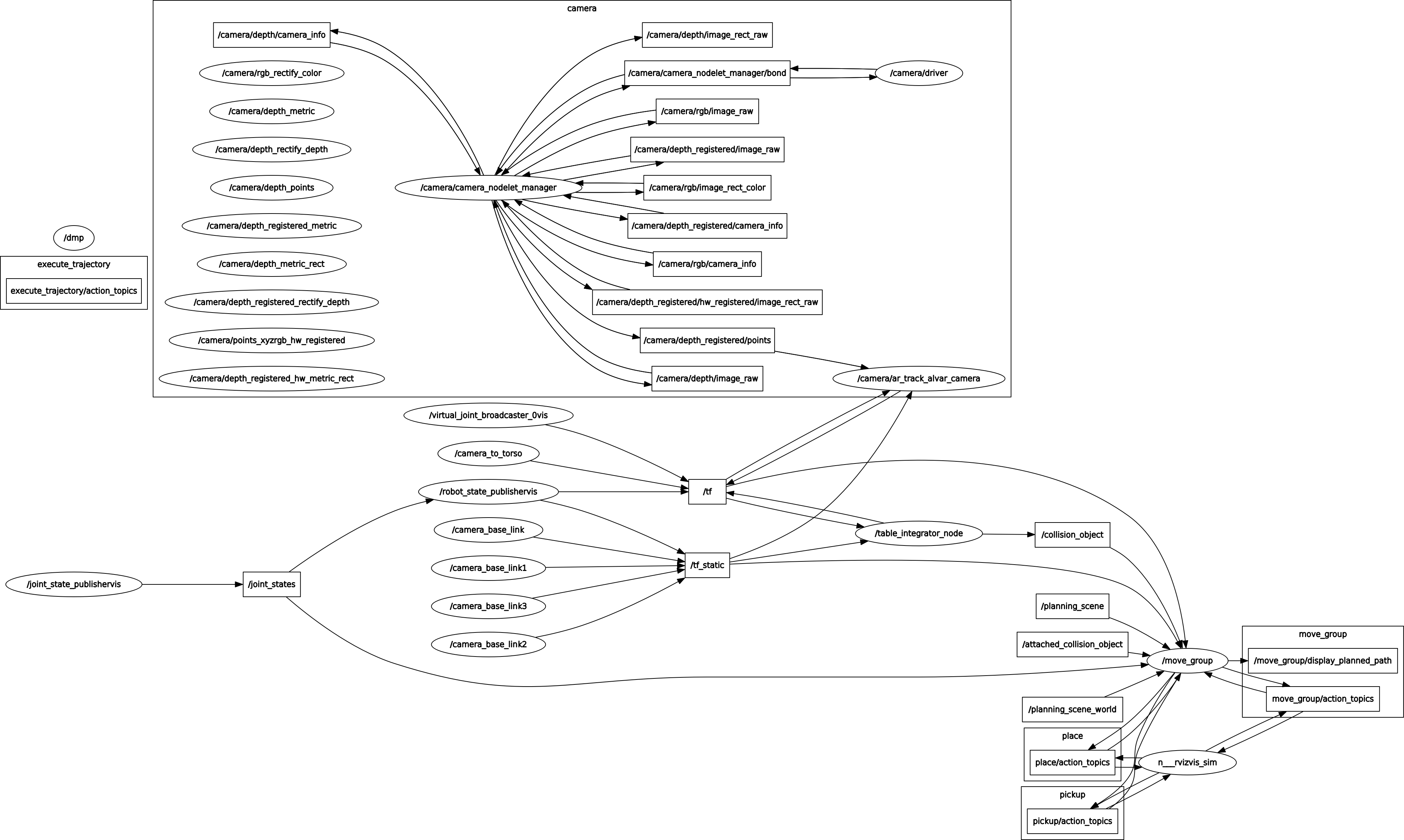
Key topics:
- /camera/depth_registered/points
- /joint_states
- /collison_object
- /tf
- /camera/depth/camera_info
- /tf_static
Components
The Table Integrator
This script uses the integrator tool to publish a single frame for the table location in /camera_rgb_optical_frame.
The table_integrator.py script itself just computes a few transforms based on observed data, and is not perfect.
You may wish to change:
- the rotations and translations between markers. these are all transforms from the marker to
/ar_marker_0. After this, an offset is applied to push everything into the right frame for the table. - the offset. This is what actually computes the location of the table.
- history length. This is used to get “smooth” estimates of where the table is.