costar_plan
Integrating learning and task planning for robots with Keras, including simulation, real robot, and multiple dataset support.
Task Learning
The goal of our hierarchical task learning is to be able to use symbolic high-level planning grounded by learned neural net models of the world.
Our training data is sequences of task execution created with the costar_bullet simulation tool, as per the figure below.
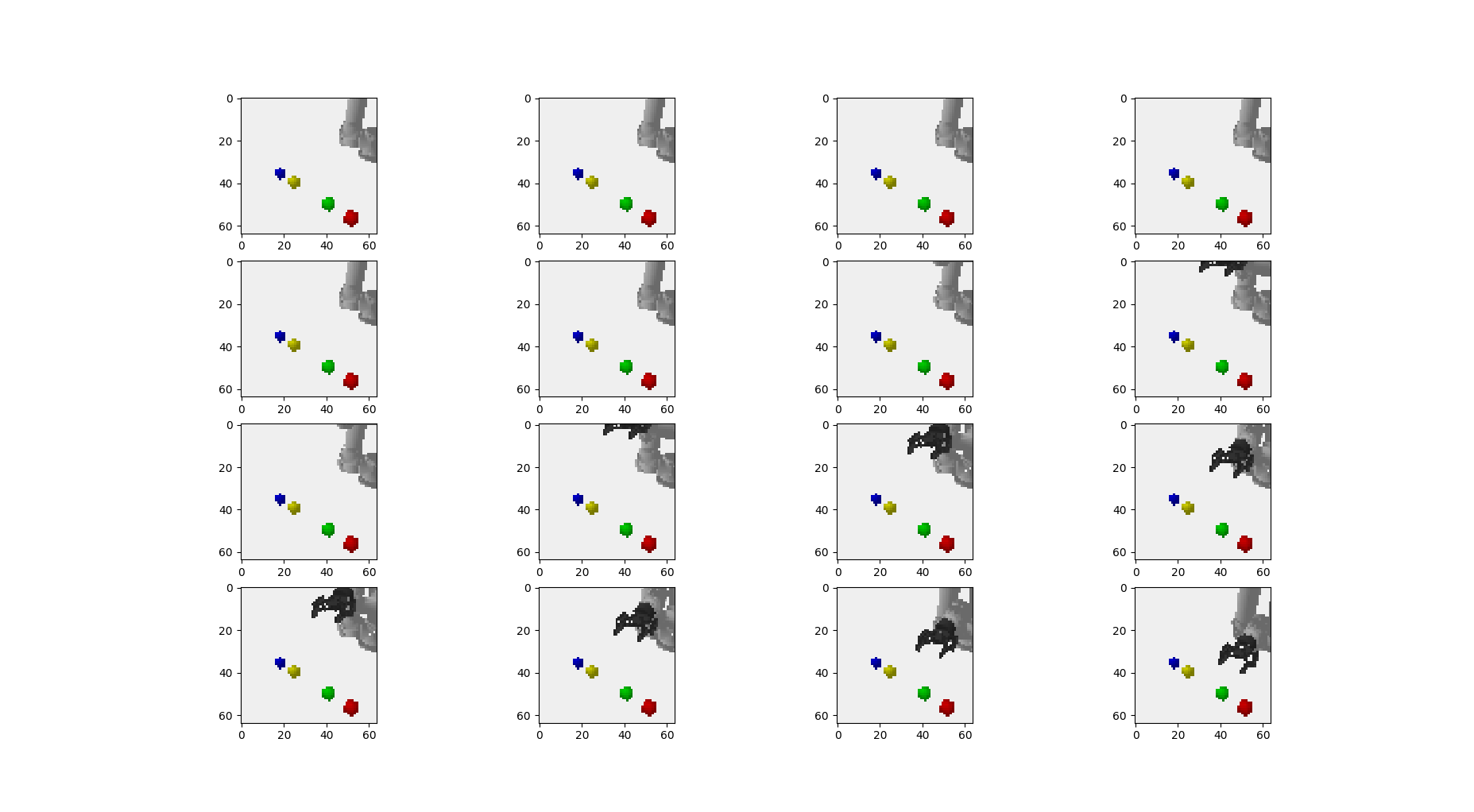
The tool lets us generate large amounts of task performances, with randomized high level (and eventually low level) actions.
ABOUT THIS DOCUMENT: This mostly consists of notes by Chris Paxton for how to get these methods to work. Some of these notes will be good; some may be out of date.
Task Definition
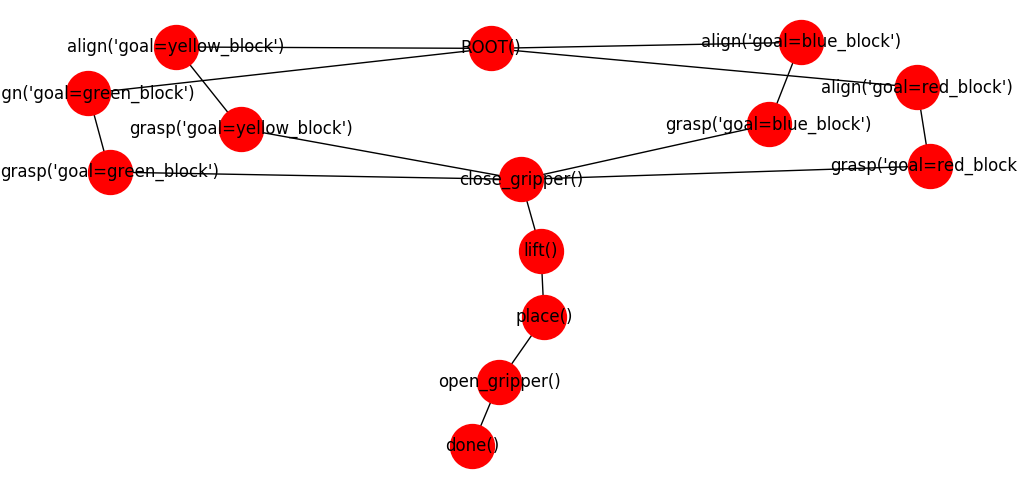
The task is defined as a set of high- and low-level actions at various levels, given by a task plan such as that shown below. For now, we will consider the simple version of the “blocks” task.
Here, the robot can grab one of several blocks. Grabbing a block is divided between aligning, approaching, and closing the gripper. We wish to define a task architecture like this one:
The code below defines this simplest version of the task, creating both the action generators themselves (called “options”), and associated conditions. There are three differnt things we need to create:
- options: these are the high-level actions; each one is a “generator” from which we can sample different policies and termination conditions.
- arguments: these contain an option constructor, arguments, and an optional field to remap from these arguments to a part of the option constructor.
- task: the task model itself.
The key parts of the Option are the constructor and the samplePolicy(world) function, which takes a current world and returns a policy functor and a condition.
The block of code below, taken from CTP’s Blocks task, defines the choice between different objects. Take a look at the basic simulation options for examples of options and the samplePolicy() function.
AlignOption = lambda goal: GoalDirectedMotionOption(
self.world,
goal,
pose=((0.05, 0, 0.05), self.grasp_q),
pose_tolerance=(0.03, 0.025),
joint_velocity_tolerance=0.05,)
align_args = {
"constructor": AlignOption,
"args": ["block"],
"remap": {"block": "goal"},
}
GraspOption = lambda goal: GoalDirectedMotionOption(
self.world,
goal,
pose=((0.0, 0, 0.0), self.grasp_q),
pose_tolerance=(0.03, 0.025),
joint_velocity_tolerance=0.05,)
grasp_args = {
"constructor": GraspOption,
"args": ["block"],
"remap": {"block": "goal"},
}
LiftOption = lambda: GeneralMotionOption(
pose=(self.over_final_stack_pos, self.grasp_q),
pose_tolerance=(0.05, 0.025),
joint_velocity_tolerance=0.05,)
lift_args = {
"constructor": LiftOption,
"args": []
}
PlaceOption = lambda: GeneralMotionOption(
pose=(self.final_stack_pos, self.grasp_q),
pose_tolerance=(0.05, 0.025),
joint_velocity_tolerance=0.05,)
place_args = {
"constructor": PlaceOption,
"args": []
}
close_gripper_args = {
"constructor": CloseGripperOption,
"args": []
}
open_gripper_args = {
"constructor": OpenGripperOption,
"args": []
}
When we create a task model, we use the add(name, parent, arg_dict) function. Its three parameters are:
name: name of the optionparent: name of the predecessor, orNoneif predecessor is rootarg_dict: dictionary containing constructor function, list of argument names, and optionally aremapdictionary from argument names to option constructor parameters.
# Create a task model
task = Task()
task.add("align", None, align_args)
task.add("grasp", "align", grasp_args)
task.add("close_gripper", "grasp", close_gripper_args)
task.add("lift", "close_gripper", lift_args)
task.add("place", "lift", place_args)
task.add("open_gripper", "place", open_gripper_args)
task.add("done", "open_gripper", lift_args)
We automatically call the task.compile() function to create the task model.
Creating a Data Set
We use three different data sets: navigation task, pybullet stacking task, and JIGSAWS suturing dataset.
You can create a small data set in the normal way:
rosrun costar_bullet start --robot ur5 --task stack1 --agent task \
--features multi --save -i 10 --data_file small.npz --success_only
It might be helpful to make a larger training data set than this one, which is possible by changing the number of iterations as seen below.
rosrun costar_bullet start --robot ur5 --task stack1 --agent task \
--features multi --save -i 100 --data_file bigger.npz --success_only
Some notes:
- For learning from demonstration, the
--success_onlyflag will make your life easier by preventing it from saving failed demonstrations. --task stack1will generate a slightly more complex and more interesting task than--task blocks.- You can use the
--fast_resetflag to quickly visualize and debug tasks, but PyBullet seems unstable over long data collection runs with this flag on. - The pybullet sim was implemented in v1.2.2, and will not be stable with a different version. Unfortunately the simulation of the gripper just is not that great.
Current Best Practice
Create some data for predictor learning, 2017-09-12:
rosrun costar_bullet start --robot ur5 --task stack1 --agent task -i 5000 \
--features multi --verbose --seed 0 --success_only --cpu --save \
--data_file stack.npz
Creating the suturing data set involves the use of the “convert_jigsaws” tool:
./costar_plan/costar_models/scripts/convert_jigsaws.py Suturing \
--out_dir costar_plan/suturing_data_jpg --drop_chance 0
where “Suturing” is the name of the directory copied from the downloaded JIGSAWS files.
Learning
Models
Current models of note:
- Conditional Image: predict the result of the next two high level actions
- Pretrain Image Encoder: pretraining step; learns the hidden space
- Secondary: trains value functions and other ancillary models like Q function, structure predictor, etc.
Older models include:
- Predictor: predict next goal, including image, arm pose, gripper state, and label.
- Hierarchical: predict an encoding that can be used for the next or the goal features.
The current preferred model is Predictor. You should use that one when possible.
Predictor Model
The predictor model learns to generate a bunch of possible futures.
Useful notes:
- Use the
ctp_model_tool, not thecostar_bullettool to start the training process. - larger amounts of data are necessary to get good performance; 5000+ examples is a good target. These do not all have to be successful examples.
- Learning rate should be 0.001; a learning rate of 0.01 did not converge. Faster learning rates will cause trouble.
- Multiple transforms are crucial; setting the number of transforms to 2 or 3 speeds loss, and gives nicer results.
- Dropout makes a big difference with the MHP loss.
- You certainly want dropout rate of 0.5 on the input models.
- You may want to play around with dropout rate on the hypotheses; this can be enabled with the
--hypothesis_dropoutflag. - Hypothesis dropout may cause predictions to blur together, so using less may actually work better.
Pretraining the Image Encoder
Pretraining has been a critical part of many of the examples of previous work we have looked at when designing the predictor networks. To help leverage these models, we have a separate training pipeline that (1) learns encoders and decoders to generate possible goals, and (2) then uses this learned representation for the predictor network.
Updated command:
rosrun costar_models ctp_model_tool --data_file rpy.npz \
--model pretrain_image_encoder \
-e 500 --features multi \
--batch_size 24 \
--optimizer adam \
--lr 0.001 \
--upsampling conv_transpose \
--steps_per_epoch 500 \
--dropout_rate 0.2 --skip_connections 1
Notes:
- Skip connections add in features from the first frame of the sequence. This represents the “root” of the planning call, and helps capture how things will change over time.
- Dropout is only used on the encoder. Using dropout on the decoder results in blurrier images.
Add Dropout
It’s also possible to add dropout to the “decoder” network.
To do so:
rosrun costar_models ctp_model_tool --data_file rpy.npz \
--model pretrain_image_encoder \
-e 1000 --features multi \
--batch_size 48 \
--optimizer adam \
--lr 0.001 \
--upsampling conv_transpose \
--steps_per_epoch 300 \
--dropout_rate 0.1 \
--skip_connections 1 \
--hypothesis_dropout 1 --decoder_dropout_rate 0.1
As of Nov. 14, 2017, I would not recommend doing this. Recommended practice is to use dropout on the encoder only.
Goal Sampler Model
This is a stripped down version of the predictor model that predicts the distribution over goals first, then predicts images separately. It is supposed to reduce some of the issues we see with learning.
rosrun costar_models ctp_model_tool --data_file rpy.npz --model goal_sampler \
-e 1000 \
--features multi \
--batch_size 64 \
--optimizer adam \
--lr 0.001 \
--upsampling conv_transpose \
--steps_per_epoch 300 \
--cpu
Hierarchical Model
This version is old and will at some point no longer be supported. The hierarchical model learns an encoding for predicting both the next set of features and an associated action.
We can now use the standard CoSTAR bullet tool to train a model:
rosrun costar_bullet start --robot ur5 --task blocks --agent null --features multi \
-i 1000 --model hierarchical --data_file small.npz --load --si 5 --lr 0.001
Replace the options as necessary. Interesting things to change:
--lrsets the learning rate--optimizerchanges the optimizer (trynadam,sgd, etc.)--sior--show_imageschanges how often we display results-iis iterations for training the predictor…-eis epochs for fitting other models (used with the Kerasmodel.fit()function)
It takes several thousand iterations to get this right. An example at about 500 iterations:
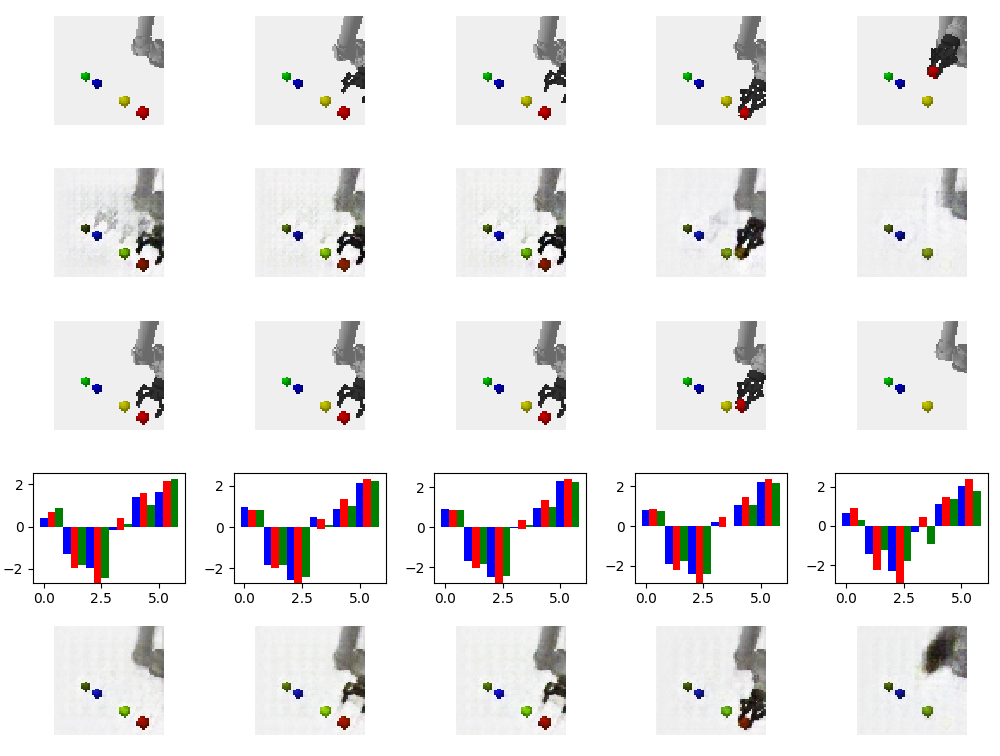
You should be able to see the model learning something useful fairly early on, at least with a small data set. It just won’t be perfect.
Testing
To run the basic model, no planning, use the same ff agent as you would for anything else:
rosrun costar_bullet start --robot ur5 --task blocks --agent ff --features multi \
-i 1 --model hierarchical --load_model --gui